با این فناوری همه میتوانند رباتها را آموزش دهند
نکات خواندني
بزرگنمايي:


سیاست و بازاریابی - ایسنا / مهندسان دانشگاه «امآیتی» یک رابط کاربری همهکاره طراحی کردهاند که به کاربران امکان میدهد مهارتهای جدید را به روشهای شهودی به رباتها آموزش دهند.
آموزش مهارتهای جدید به یک ربات قبلاً به تخصص کدنویسی نیاز داشت اما نسل جدید رباتها میتوانند تقریباً از هر کسی یاد بگیرند.
بازار ![]()
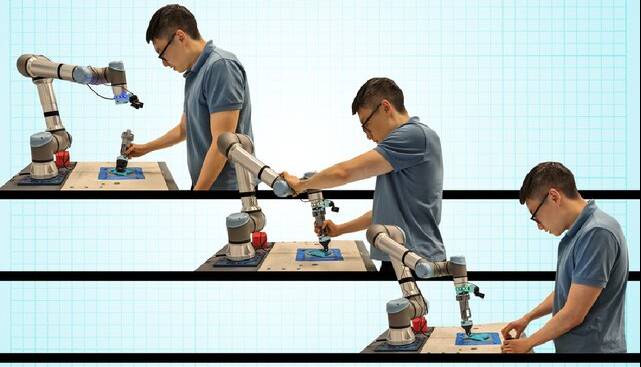
مهندسان در حال طراحی رباتهای کمکی هستند که میتوانند از طریق نمایش یاد بگیرند. این راهبرد آموزشی طبیعیتر، کاربر را قادر میسازد تا یک ربات را برای انجام دادن یک کار هدایت کند. هدایت ربات معمولاً به سه روش انجام میشود که عبارتند از کنترل از راه دور، حرکت دادن فیزیکی ربات از طریق حرکات یا با انجام دادن کار توسط خود کاربر در حالی که ربات تماشا و از او تقلید میکند.
رباتهایی که از طریق انجام کار یاد میگیرند، معمولاً فقط با یکی از این سه روش نمایشی آموزش میبینند اما مهندسان دانشگاه «امآیتی»(MIT) اکنون یک رابط آموزشی سه در یک را ابداع کردهاند که به ربات امکان میدهد تا از طریق هر یک از سه روش آموزشی، یک کار را یاد بگیرد. این رابط به شکل یک ابزار دستی مجهز به حسگر است که میتواند به بسیاری از بازوهای رباتیک مشترک متصل شود. کاربر میتواند از این وسیله برای آموزش دادن کار به ربات با کنترل از راه دور آن، دستکاری فیزیکی آن یا نمایش خود کار استفاده کند.
گروه دانشگاه امآیتی این فناوری جدید که آن را «رابط نمایشی همهکاره» مینامند، روی یک بازوی رباتیک استاندارد آزمایش کردند. داوطلبان متخصص در تولید از این رابط برای انجام دادن دو کار دستی که معمولاً در کارخانهها انجام میشود، استفاده کردند.
این گروه پژوهشی میگویند رابط کاربری جدید، انعطافپذیری آموزشی بیشتری را ارائه میدهد که میتواند نوع کاربران و مربیانی را که با رباتها تعامل دارند، گسترش دهد. همچنین، این رابط ممکن است رباتها را قادر سازد تا مجموعه وسیعتری از مهارتها را بیاموزند. به عنوان مثال، یک نفر میتواند ربات را از راه دور برای کار کردن با مواد سمی آموزش دهد، در حالی که در خط تولید، شخص دیگری میتواند ربات را هنگام بستهبندی محصول حرکت دهد و در پایان خط، شخص دیگری میتواند به ترسیم لوگوی شرکت بپردازد؛ در حالی که ربات تماشا میکند و یاد میگیرد که همین کار را انجام دهد.
«مایک هاگنو»(Mike Hagenow) دانشجوی پسادکتری در دانشکده هوانوردی و فضانوردی دانشگاه امآیتی گفت: ما سعی داریم همکاران بسیار باهوش و ماهری را ایجاد کنیم که بتوانند به طور مؤثر با انسانها برای انجام دادن کارهای پیچیده همکاری کنند. ما معتقدیم که روشهای نمایشی انعطافپذیر میتوانند فراتر از سطح تولید، در حوزههای دیگری که امیدواریم شاهد افزایش پذیرش رباتها در آنها باشیم - مانند خانه یا محیطهای مراقبتی - بسیار سودمند باشند.
گروه پژوهشی «جولی شاه»(Julie Shah) استاد دانشگاه امآیتی، رباتهایی را طراحی میکنند که میتوانند در کنار انسانها در محل کار، بیمارستانها و خانه کار کنند. تمرکز اصلی تحقیقات شاه بر توسعه سیستمهایی است که افراد را قادر میسازند تا وظایف یا مهارتهای جدید را به رباتها هنگام کار کردن آموزش دهند. به عنوان مثال، چنین سیستمهایی به یک کارگر کارخانه کمک میکنند تا به سرعت و به طور طبیعی مانورهای ربات را برای بهبود در لحظه وظیفهاش تنظیم کند، نه این که برای برنامهریزی مجدد نرمافزار ربات که ممکن است یک کارگر لزوماً مهارت آن را نداشته باشد، از ابتدا شروع کند.
کار جدید این گروه براساس یک راهبرد نوظهور در یادگیری رباتها به نام «یادگیری از طریق نمایش» بنا شده است. در این روش، رباتها طوری طراحی میشوند که به روشهای طبیعیتر و شهودیتر آموزش ببینند. هاگنو و شاه با بررسی متون مربوط به روش یادگیری از طریق نمایش دریافتند که روشهای آموزشی توسعهیافته تا به امروز عموماً در سه گروه اصلی عملیات از راه دور، آموزش حرکتی و آموزش طبیعی قرار میگیرند.
ممکن است یک روش آموزشی برای یک نفر یا یک وظیفه خاص، بهتر از دو روش دیگر عمل کند. شاه و هاگنو در این فکر بودند که آیا میتوانند نوعی فناوری را طراحی کنند که هر سه روش را با هم ترکیب کند تا یک ربات بتواند وظایف بیشتری را از افراد بیشتری یاد بگیرد. هاگنو گفت: اگر بتوانیم این سه روش تعامل با ربات را گرد هم آوریم، ممکن است برای وظایف گوناگون و افراد گوناگون مزایایی به همراه داشته باشد.
پژوهشگران با در نظر گرفتن این هدف، یک رابط نمایشی همهکاره را طراحی کردند. این رابط روی یک بازوی رباتیک معمولی قرار گیرد. رابط به یک دوربین و چند نشانگر مجهز است که موقعیت و حرکات را ردیابی میکنند و همچنین، چند حسگر نیرو را برای اندازهگیری میزان فشار اعمالشده در طول یک کار مشخص دارد.
وقتی رابط به ربات متصل میشود، میتوان کل ربات را از راه دور کنترل کرد و دوربین رابط، حرکات ربات را ضبط میکند تا ربات از آنها به عنوان دادههای آموزشی برای یادگیری وظیفه به تنهایی استفاده کند. به طور مشابه، یک انسان میتواند ربات را به هنگام انجام وظیفه و در حالی که رابط به آن متصل است، حرکت دهد. همچنین، رابط را میتوان جدا کرد و یک انسان میتواند آن را نگه دارد تا وظیفه مورد نظر را انجام دهد. دوربین، حرکات رابط را ضبط میکند تا ربات از آنها برای تقلید وظیفه هنگام اتصال مجدد استفاده کند.
پژوهشگران برای آزمایش قابلیت استفاده از این فناوری، رابط را به همراه یک بازوی رباتیک به یک مرکز نوآوری محلی بردند تا در آنجا متخصصان تولید درباره فناوریهایی که میتوانند فرآیندهای کار در کارخانه را بهبود ببخشند، اطلاعات به دست بیاورند و آنها را مورد بررسی قرار دهند. پژوهشگران یک آزمایش را ترتیب دادند که در آن از داوطلبان حاضر در مرکز نوآوری خواسته شد تا از ربات و هر سه روش آموزشی رابط برای انجام دادن دو کار رایج در تولید شامل پرسکاری و قالبگیری استفاده کنند. در پرسکاری، کاربر به ربات آموزش داد تا به میخها فشار بیاورد و در سوراخها قرار دهد. در قالبگیری، یک داوطلب به ربات آموزش داد تا ماده لاستیکی و خمیرمانند را به طور یکنواخت در اطراف سطح یک میله مرکزی فشار دهد و بغلتاند.
برای هر یک از دو وظیفه، از داوطلبان خواسته شد تا از هر سه روش آموزشی استفاده کنند. آنها باید ابتدا ربات را با استفاده از یک جویاستیک از راه دور تحت کنترل درمیآوردند. سپس، باید ربات را به صورت حرکتی تنظیم میکردند و در نهایت، اتصال ربات را جدا میکردند و از آن برای انجام دادن وظیفه به صورت طبیعی بهره میبردند. در همین حال، ربات نیرو و حرکات اتصال را ثبت میکرد.
پژوهشگران دریافتند که داوطلبان عموماً روش طبیعی را بر آموزش از راه دور و آموزش حرکتی ترجیح میدهند. کاربران که همگی متخصص در تولید بودند، سناریوهایی را ارائه دادند که در آنها هر روش ممکن است مزایایی را نسبت به سایر روشها داشته باشد. به عنوان مثال، در آموزش یک ربات برای جابهجایی مواد خطرناک یا سمی ممکن است آموزش از راه دور ترجیح داده شود. آموزش حرکتی میتواند به کارگران کمک کند تا موقعیت رباتی که وظیفه جابهجایی بستههای سنگین را بر عهده دارد، تنظیم کنند. آموزش طبیعی میتواند در نشان دادن کارهایی که شامل مانورهای ظریف و دقیق هستند، سودمند باشد.
هاگنو که قصد دارد طراحی این فناوری را بر اساس بازخورد کاربران اصلاح کند و از طراحی جدید برای آزمایش یادگیری ربات بهره ببرد، گفت: ما استفاده از رابط نمایشی خود را در محیطهای تولیدی انعطافپذیر به نمایش میگذاریم که در آنها یک ربات ممکن است در طیف گستردهای از وظایف با بهرهمندی از نمایشهای خاصی کمک کند. ما این پژوهش را به عنوان نشانهای از چگونگی دستیابی به انعطافپذیری بیشتر در رباتها از طریق رابطهایی میبینیم که روشهای تعامل کاربران نهایی با رباتها را در طول آموزش گسترش میدهند.

لینک کوتاه:
https://www.siasatvabazaryabi.ir/Fa/News/781428/