رباتی که پینگ پنگ را با مهارت یک انسان بازی میکند
نکات خواندني
بزرگنمايي:


سیاست و بازاریابی - ایسنا / دانشمندان موسسه فناوری ماساچوست رباتی ساختهاند که میتواند تنیس روی میز را با مهارت و استعداد یک بازیکن انسانی بازی کند. این ربات با سرعت 14 متر در ثانیه به توپ ضربه میزند و این به اندازهای سریع است که میتواند بازیکنان انسانی با سطح بازی متوسط را به چالش بکشد.
یک بازوی رباتیک سفارشی به طور خاص برای حرکات سریع و دقیق مورد نیاز در تنیس روی میز طراحی شده است. برخلاف تلاشهای رباتیک قبلی در این ورزش، که اغلب از رباتهای صنعتی آماده که بسیار سنگین و کُند بودند استفاده میکردند، این ماشین هدفمند با استفاده از اجزای سبک وزن با موتورهایی که برای به حداقل رساندن اینرسی مورد استفاده قرار گرفتهاند، به سرعت چشمگیری دست یافته است.
به نقل از اساف، محققان میگوید که ساخته آنها قادر به اجرای سبکهای مختلف ضربه با دقت، قدرت و ثبات چشمگیر است و همهی این عناصر برای بازی تنیس روی میز حیاتی است.
این ربات تنها سرعت چشمگیر ندارد. این سیستم میتواند انواع مختلفی از ضربات را که بازیکنان انسانی اجرا میکنند با 88 درصد موفقیت در هر سه سبک انجام دهد. این تطبیقپذیری، تنیس روی میز رباتیک را به سیالیت و سازگاری بازی انسانها نزدیکتر میکند.
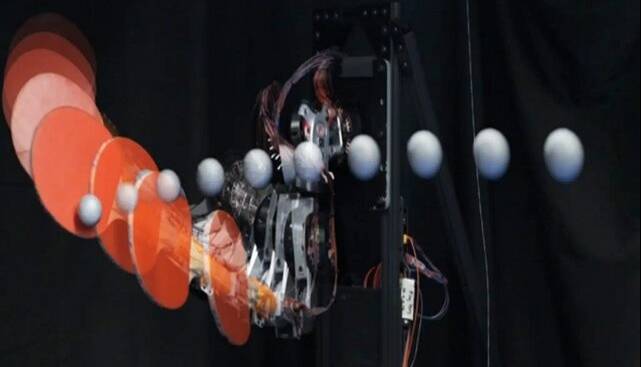
بازوی رباتیک در حال بازی پینگ پنگ
این بازوی ربایتک سفارشی تنها سه کیلوگرم وزن دارد، اما دارای چهار موتور با گشتاور بالا است که میتوانند راکت بازی را با سرعت 180 تا 300 متر بر مجذور ثانیه شتاب دهند که بسیار فراتر از آن کاری است که رباتهای صنعتی استاندارد میتوانند به آن دست یابند. این شتاب به ربات اجازه میدهد تا به اندازه کافی سریع واکنش نشان دهد تا با موقعیت، جهت و سرعت صحیح با توپهای ورودی برخورد کند.
به گفته محققان، بازیکنان برتر انسانی میتوانند حرکات فورهند را با سرعت حدود 21 متر در ثانیه اجرا کنند و ضربات را با سرعت حدود 25 متر در ثانیه وارد کنند. در حالی که ربات موسسه فناوری ماساچوست هنوز به طور کامل به این سرعتها نرسیده است، اما نسبت به تلاشهای قبلی به این سرعتها نزدیکتر شده است.
این سیستم به یک الگوریتم پیشبینی پیچیده متکی است که محاسبه میکند توپ ورودی از کجا خواهد آمد و چه زمانی میرسد. شش دوربین ضبط حرکت، توپها را با سرعت 120 فریم در ثانیه ردیابی میکنند، در حالی که نرمافزار تخصصی مسیر توپ را پیشبینی میکند و دینامیک جهش و مقاومت هوا را در نظر میگیرد.
برای تولید حرکت نوسانی ربات، این تیم یک سیستم کنترل پیشبینیکننده مدل (MPC) ایجاد کرد که دائما مسیر را بر اساس اطلاعات بهروز شده موقعیت توپ، برنامهریزی مجدد میکند. این به ربات اجازه میدهد تا در صورت تغییر پیشبینی، نوسان میانی را تنظیم کند.
محققان ربات خود را با 150 توپ برای هر نوع ضربهای آزمایش کردند. میانگین سرعت خروج توپ حدود 11 متر در ثانیه اندازهگیری شد.
رباتهای تنیس روی میز قبلی با مشکل مواجه بودهاند. برخی به سیستمهای بزرگی نیاز داشتند که راکت را بالای میز حرکت میدادند، اما برای سایر وظایف قابل تطبیق نبودند. برخی دیگر از بازوهای رباتیک صنعتی استفاده میکردند که برای شتابگیری سریع بیش از حد سنگین بودند.
بازوی سفارشی این گروه از محققان با پنج درجه آزادی، از نظر ساختار شبیه بازوی انسان است و دارای مفاصل شانه و آرنج است.
برای موفقیت ربات، زمانبندی اهمیت بسیار زیادی دارد. سیستم باید دادههای دوربین را دریافت کند، مسیر توپ را پیشبینی کند، مسیر ضربه را بهینه کند و حرکت را اجرا کند و همهی این کارها را در عرض چند میلیثانیه انجام دهد. محققان زمان واکنش سیستم خود را بین دریافت مشاهدات جدید توپ و اجرای مسیرهای جدید تنها در 7.5 تا 16 میلیثانیه اندازهگیری کردند.
موقعیت، جهتگیری و سرعت راکت باید به طور دقیق کنترل شود تا انواع مختلف ضربه حاصل شود.
در حالی که این سیستم چشمگیر است، اما هنوز هم جای بهتر شدن دارد. محققان خاطرنشان میکنند که سیستم فعلی آنها سرعت توپ ورودی را محدود میکند و هنوز قابلیت تشخیص چرخش توپهای ورودی را ندارد. این ربات همچنین در حال حاضر فقط بر ضربه زدن به توپ تمرکز دارد و بر جایگذاری استراتژیک توپهای برگشتی متمرکز نیست.
انتهای پیام

لینک کوتاه:
https://www.siasatvabazaryabi.ir/Fa/News/776362/